Sistemas electrónicos de estabilización (ESP, AHS, DSC, PSM, VDC, VSC)
 Estes sistemas garanten que o vehículo se comporte con seguridade en situacións críticas, especialmente cando se fai curva. Durante o movemento, os sistemas avalían varios indicadores, como a velocidade ou a rotación do volante, e en caso de risco de derrapaxe, os sistemas poden devolver o coche á súa dirección orixinal freando as rodas individuais. En vehículos máis caros, os sistemas de control de estabilidade tamén contan cun chasis activo que se adapta á superficie e ao estilo de condución do condutor e contribúe ademais á seguridade na condución. A maioría dos coches usan un sistema de marcado nos seus vehículos. ESP (Mercedes-Benz, Skoda, VW, Peugeot e outros). Con marcado AHS (Sistema de procesamento activo) usado por Chevrolet nos seus vehículos, DSC (Control dinámico de seguridade) BMW, psm (Sistema de xestión de estabilidade Porsche), V DC (Control da dinámica do vehículo) está instalado nos coches Subaru, V.S.C. (Control de estabilidade do vehículo) tamén está instalado en vehículos Subaru e Lexus.
Estes sistemas garanten que o vehículo se comporte con seguridade en situacións críticas, especialmente cando se fai curva. Durante o movemento, os sistemas avalían varios indicadores, como a velocidade ou a rotación do volante, e en caso de risco de derrapaxe, os sistemas poden devolver o coche á súa dirección orixinal freando as rodas individuais. En vehículos máis caros, os sistemas de control de estabilidade tamén contan cun chasis activo que se adapta á superficie e ao estilo de condución do condutor e contribúe ademais á seguridade na condución. A maioría dos coches usan un sistema de marcado nos seus vehículos. ESP (Mercedes-Benz, Skoda, VW, Peugeot e outros). Con marcado AHS (Sistema de procesamento activo) usado por Chevrolet nos seus vehículos, DSC (Control dinámico de seguridade) BMW, psm (Sistema de xestión de estabilidade Porsche), V DC (Control da dinámica do vehículo) está instalado nos coches Subaru, V.S.C. (Control de estabilidade do vehículo) tamén está instalado en vehículos Subaru e Lexus.
A abreviatura ESP vén do inglés Programa de estabilidade electrónica e significa programa de estabilización electrónica. Polo propio nome, está claro que se trata dun representante dos asistentes electrónicos de condutores en termos de estabilidade á condución. O descubrimento e posterior implementación de ESP foi un avance na industria do automóbil. Unha situación similar ocorreu unha vez coa introdución do ABS. O ESP axuda ao condutor inexperto e con moita experiencia a xestionar algunhas das situacións críticas que poden xurdir ao conducir. Unha serie de sensores no coche rexistran os datos actuais de condución. Estes datos compáranse a través da unidade de control cos datos calculados para o modo de condución correcto. Cando se detecta unha diferenza, o ESP actívase automaticamente e estabiliza o vehículo. ESP utiliza outros sistemas de chasis electrónicos para a súa función. Os traballadores electrónicos máis importantes inclúen o sistema de freada antiblocado ABS, os sistemas antideslizantes (ASR, TCS e outros) e o consello sobre o funcionamento dos sensores ESP necesarios.
O sistema foi desenvolvido por enxeñeiros de Bosch e Mercedes. O primeiro coche que se equipou con ESP foi o coupe de luxo S 1995 (C 600) en marzo de 140. Poucos meses despois, o sistema tamén se dirixiu ás clásicas Clase S (W 140) e SL Roadster (R 129). O prezo deste sistema era tan alto que nun principio o sistema só era estándar en combinación co motor de 6,0 cilindros de gama alta de 12 V1997, para outros motores ESP só se ofrecía por un sobrecusto. O verdadeiro boom do ESP debeuse a cousas aparentemente pequenas e, en certo xeito, á coincidencia. En XNUMX, os xornalistas suecos realizaron unha proba de estabilidade para a entón novidade, que era o Mercedes A. Para a gran sorpresa de todos os presentes, Mercedes A non puido facer fronte á chamada proba dos alces. Isto marcou o comezo dun negocio que obrigou aos fabricantes a suspender a produción por un curto período de tempo. Os esforzos dos técnicos e deseñadores da planta de automóbiles de Stuttgart para atopar a solución correcta ao problema coroáronse con éxito. Baseado en numerosas probas, o ESP converteuse nunha parte estándar de Mercedes A. Isto, á súa vez, significou un aumento na produción deste sistema das decenas de miles esperadas a centos de miles, podendo alcanzarse prezos máis accesibles. ESP abriu o camiño para o seu uso en vehículos medianos e pequenos. O nacemento do ESP foi unha auténtica revolución no campo da condución segura e hoxe está relativamente estendido non só grazas a Mercedes-Benz. A existencia de ESP, que está en desenvolvemento e actualmente é o seu maior fabricante, contribuíu moito á existencia de ESP.
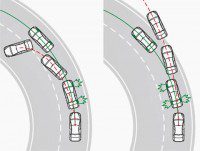
Na maioría dos sistemas electrónicos, o cerebro é a unidade de control electrónico, e este non é o caso do ESP. A tarefa da unidade de control é comparar os valores reais dos sensores cos valores calculados durante a condución. A dirección necesaria está determinada polo ángulo de xiro e a velocidade de xiro das rodas. As condicións reais de condución calcúlanse en función da aceleración lateral e da rotación do vehículo ao redor do seu eixe vertical. Se se detecta unha desviación dos valores calculados, actívase o proceso de estabilización. O funcionamento do ESP regula o par motor e afecta ao sistema de freos dunha ou máis rodas, eliminando así o movemento non desexado do vehículo. O ESP pode corrixir o subviraxe e o sobreviraxe nas curvas. O subviraxe do vehículo corríxese freando a roda interior traseira. O sobreviraxe corríxese freando a roda exterior dianteira. Ao frear unha determinada roda, xéranse forzas de freada sobre esa roda durante a estabilización. Segundo unha simple lei da física, estas forzas de freada crean un torque arredor do eixe vertical do vehículo. O par resultante sempre contrarresta os movementos non desexados e, polo tanto, devolve o vehículo na dirección desexada ao virar en curva. Tamén xira o coche na dirección correcta cando non está a virar. Un exemplo de funcionamento do ESP son as curvas rápidas cando o eixe dianteiro sae rapidamente da curva. O ESP reduce primeiro o par motor. Se esta acción non é suficiente, a roda interior traseira está freada. O proceso de estabilización continúa ata que diminúe a tendencia ao deslizamento.
O ESP baséase nunha unidade de control común ao ABS e outros sistemas electrónicos como o distribuidor de forza de freo EBV / EBD, o regulador de par motor (MSR) e os sistemas antideslizantes (EDS, ASR e TCS). A unidade de control procesa datos 143 veces por segundo, é dicir, cada 7 milisegundos, o que é case 30 veces máis rápido que o dun ser humano. O ESP require unha serie de sensores para funcionar, como:
- sensor de detección de freos (informa á unidade de control cuxo condutor está a frear),
- sensores de velocidade para rodas individuais,
- sensor de ángulo do volante (determina a dirección de marcha requirida),
- sensor de aceleración lateral (rexistra a magnitude das forzas laterais actuantes, como a forza centrífuga na curva),
- un sensor de rotación do vehículo arredor do eixe vertical (para avaliar a rotación do vehículo arredor do eixe vertical e determinar o estado actual de movemento),
- sensor de presión de freo (determina a presión actual no sistema de freo, a partir do cal se poden calcular as forzas de freada e, polo tanto, as forzas lonxitudinais que actúan sobre o vehículo),
- sensor de aceleración lonxitudinal (só para vehículos con tracción ás catro rodas).
Ademais, o sistema de freada require un dispositivo de presión adicional que aplique presión cando o condutor non frea. A unidade hidráulica distribúe a presión do freo ás rodas dos freos. O interruptor da luz de freo está deseñado para acender as luces de freo se o condutor non frea cando o sistema ESP está acendido. Ás veces pódese desactivar o ESP cun botón no taboleiro, o que resulta conveniente, por exemplo, cando se conduce con cadeas de neve. Apagar ou acender o sistema indícase cun indicador iluminado no panel de instrumentos.
O ESP permítelle superar un pouco os límites das leis da física e así aumentar a seguridade activa. Se todos os coches estivesen equipados con ESP, poderían evitarse aproximadamente unha décima parte dos accidentes. O sistema verifica constantemente a estabilidade se non está apagado. Así, o condutor ten unha maior sensación de seguridade, especialmente en estradas xeadas e nevadas. Dado que o ESP corrixe a dirección de marcha na dirección desexada e compensa as desviacións causadas polo derrapaje, reduce significativamente o risco de accidentes en situacións críticas. Non obstante, cómpre subliñar nun alento que nin o ESP máis moderno salvará a un condutor temerario que non siga as leis da física.
Dado que ESP é unha marca comercial de BOSCH e Mercedes, outros fabricantes usan o sistema Bosch e o nome ESP ou ben desenvolveron o seu propio sistema e usan un acrónimo (propio) diferente.
Acura–Honda: Control de estabilidade do vehículo (VSA)
Alfa Romeo: Control dinámico de vehículos (VDC)
Audi: Programa de Estabilidade Electrónica (ESP)
Bentley: Programa de Estabilidade Electrónica (ESP)
BMW: vrátane Dynamic Traction Control DSC
Bugatti: Programa de Estabilidade Electrónica (ESP)
Código: StabiliTrak
Cadillac: StabiliTrak e dirección dianteira activa (AFS)
Chery Car: programa de estabilidade electrónica
Chevrolet: StabiliTrak; Manexo activo (Lin Corvette)
Chrysler: Programa de Estabilidade Electrónica (ESP)
Citroën: Programa de Estabilidade Electrónica (ESP)
Dodge: Programa de Estabilidade Electrónica (ESP)
Daimler: Programa de Estabilidade Electrónica (ESP)
Fiat: Programa de Estabilidade Electrónica (ESP) e Control Dinámico do Vehículo (VDC)
Ferrari: Control establecido (CST)
Ford: AdvanceTrac con control de estabilidade de rotación (RSC), dinámica de vehículos interactivos (IVD), programa de estabilidade electrónica (ESP) e control de estabilidade dinámico (DSC)
General Motors: StabiliTrak
Holden: Programa de Estabilidade Electrónica (ESP)
Hyundai: Programa electrónico de estabilidade (ESP), Control electrónico de estabilidade (ESC), Asistencia de estabilidade do vehículo (VSA)
Infiniti: Control dinámico do vehículo (VDC)
Jaguar: Control dinámico de estabilidade (DSC)
Jeep: Programa de Estabilidade Electrónica (ESP)
Kia: Control electrónico de estabilidade (ESC) e Programa electrónico de estabilidade (ESP)
Lamborghini: Programa electrónico de estabilidade (ESP)
Land Rover: Control dinámico de estabilidade (DSC)
Lexus: Xestión integrada da dinámica do vehículo (VDIM) e control de estabilidade do vehículo (VSC)
Lincoln: AdvanceTrac
Maserati: Maserati Stability Program (MSP)
Mazda: Control de estabilidade dinámica (DSC), control de tracción dinámico
Mercedes-Benz: Programa de Estabilidade Electrónica (ESP)
Mercurio: AdvanceTrac
MINI: Control dinámico de estabilidade
Mitsubishi: MULTI-MODE Control de Estabilidade Activo e Control de Tracción un Control de Estabilidade Activo (ASC)
Nissan: Control dinámico do vehículo (VDC)
Oldsmobile: sistema de control de precisión (PCS)
Opel: Programa de Estabilidade Electrónica (ESP)
Peugeot: Programa de Estabilidade Electrónica (ESP)
Pontiak: Stabili Trak
Porsche: Porsche Stability Control (PSM)
Protón: programa de estabilización electrónica
Renault: Programa de Estabilidade Electrónica (ESP)
Grupo Rover: Control dinámico de estabilidade (DSC)
Saab: Programa de Estabilidade Electrónica (ESP)
Saturno: StabiliTrak
Scania: Programa de Estabilidade Electrónica (ESP)
SEAT: Programa de Estabilidade Electrónica (ESP)
Škoda: Programa de Estabilidade Electrónica (ESP)
Intelixente: programa de estabilidade electrónica (ESP)
Subaru: Control da dinámica do vehículo (VDC)
Suzuki: Programa de Estabilidade Electrónica (ESP)
Toyota: Xestión Integrada de Dinámica de Vehículos (VDIM) e Control de Estabilidade de Vehículos (VSC)
Vauxhall: Programa electrónico de estabilidade (ESP)
Volvo: Control de tracción e estabilidade dinámica (DSTC)
Volkswagen: Programa de Estabilidade Electrónica (ESP)
